Visual SLAM이란? SLAM(Simultaneous localization and mapping), 동시적 위치 추정 및 지도 작성으로, 임의 공간에서 이동할 때 주변을 탐색하면서 이동한 공간의 지도를 작성하고 자신의 위치를 파악하는 기술
Localization: 위치 추정 Mapping: 지도 작성
카메라 영상 정보를 센서로 활용하는 SLAM
가격이 싸지만 계산 비용이 높음
종류
Monocular: 1개의 단안 카메라
Stereo: 2개의 고정된 카메라
RGB-D: depth 정보를 얻을 수 있는 카메라
Stereo camera 예시
ORB SLAM 이란?
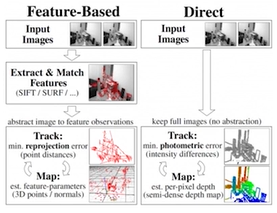
Feature-based
- ORB(Oriented FAST and Rotated BRIEF) 특징점 검출 방식을 사용
- Feature Based 방식: 영상에서 특징점 추출
- Direct 방식: 영상의 픽셀 정보를 그대로 이용
- Monocular camera
- 1개의 단안 카메라를 센서로 이용
Feature-Based와 Direc 방식(좌), Monocular camera를 이용한 SLAM(우)